Publications
Publications are listed in reverse chronological order.
* denotes equal contribution.
2025
-
- ACMMMCogDDN: A Cognitive Demand-Driven Navigation with Decision Optimization and Dual-Process ThinkingIn Proceedings of the 33rd ACM International Conference on Multimedia, 2025
- IROSL2COcc: Lightweight Camera-Centric Semantic Scene Completion via Distillation of LiDAR Model2025
- AAAIDriving in the occupancy world: Vision-centric 4d occupancy forecasting and planning via world models for autonomous drivingIn Proceedings of the AAAI Conference on Artificial Intelligence, 2025
- IROSL2COcc: Lightweight Camera-Centric Semantic Scene Completion via Distillation of LiDAR ModelarXiv preprint arXiv:2503.12369, 2025
2024
- Camera-Based 3D Semantic Scene Completion With Sparse Guidance NetworkIEEE Transactions on Image Processing, 2024
- RadarCam-Depth: Radar-Camera Fusion for Depth Estimation with Learned Metric ScaleIn 2024 IEEE International Conference on Robotics and Automation (ICRA), 2024
- IROSMonocular Event-Inertial Odometry with Adaptive decay-based Time Surface and Polarity-aware TrackingIn 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
- JFRFMCW Radar on LiDAR map localization in structural urban environmentsJournal of Field Robotics, 2024
- A Coarse-to-Fine Place Recognition Approach using Attention-guided Descriptors and Overlap EstimationIn 2024 IEEE International Conference on Robotics and Automation (ICRA), 2024



2023
- Coco-LIC: Continuous-Time Tightly-Coupled LiDAR-Inertial-Camera Odometry Using Non-Uniform B-SplineIEEE Robotics and Automation Letters, 2023
- OverlapNetVLAD: A coarse-to-fine framework for LiDAR-based place recognitionarXiv e-prints, 2023
- OL-SLAM: a robust and versatile system of object localization and slamSensors, 2023
-
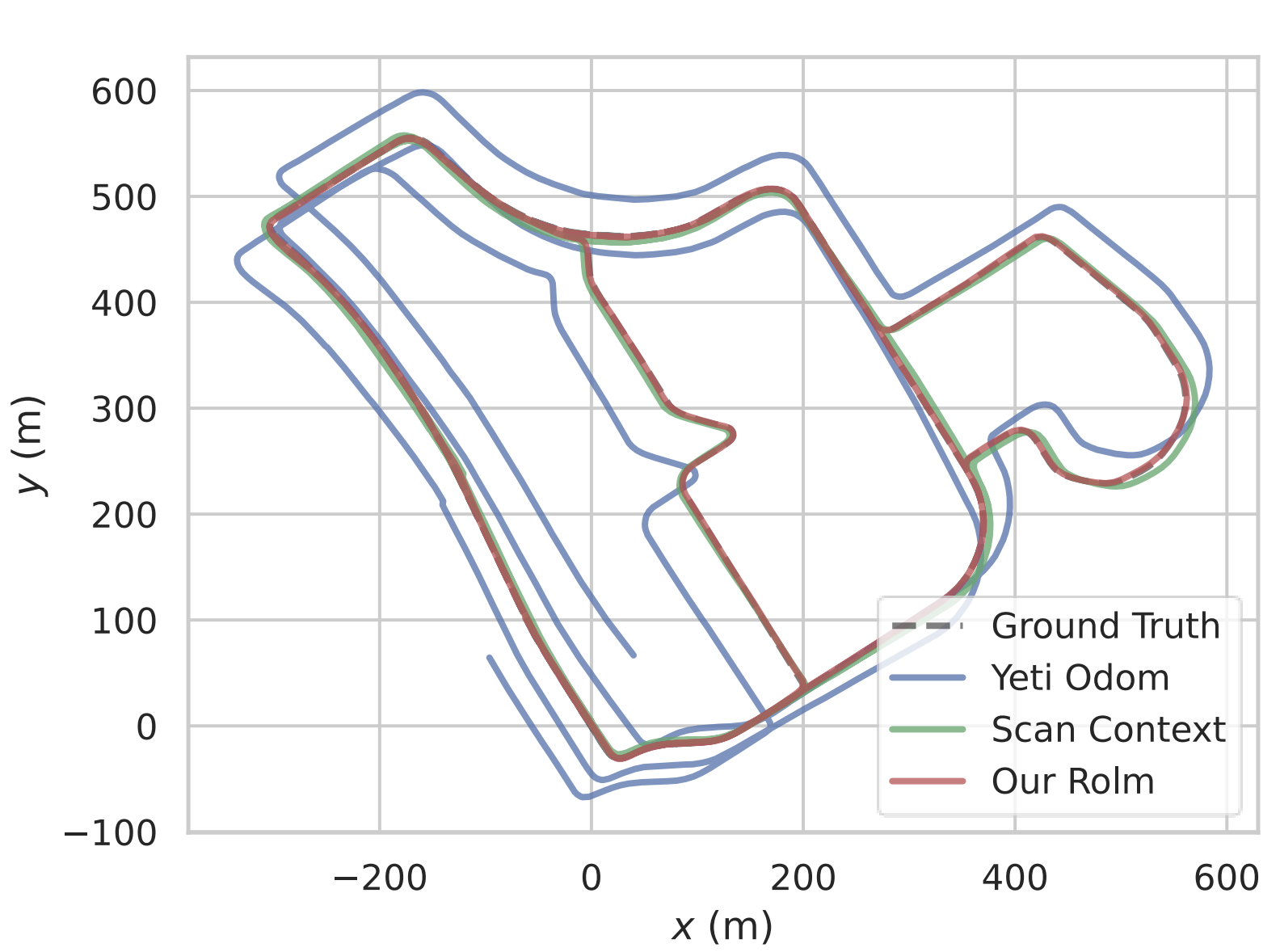 RoLM: Radar on LiDAR Map LocalizationIn 2023 IEEE International Conference on Robotics and Automation (ICRA), 2023
RoLM: Radar on LiDAR Map LocalizationIn 2023 IEEE International Conference on Robotics and Automation (ICRA), 2023 - SUBP: Soft Uniform Block Pruning for 1$\backslashtimes $ N Sparse CNNs Multithreading AccelerationAdvances in Neural Information Processing Systems, 2023
2022
- Ctrl-VIO: Continuous-Time Visual-Inertial Odometry for Rolling Shutter CamerasIEEE Robotics and Automation Letters, 2022