YUKAI MA
Autonomous Driving | Robotics Researcher

I am a visiting researcher at the Department of Computer Science, University of California, Los Angeles, advised by Bolei Zhou. I am studying for PhD degree in Zhejiang University since 2021, where I was a member of the APRIL Lab under the guidance of Dr. Yong Liu. I am interning in ADLab at Shanghai AI Laboratory from 2023 to 2025. Prior to this, I got my bachelor’s degree from Jianxing campus of Zhejiang University of Technology in 2021 under the guidance of Prof. Li Yu.
Research Interests
The following are my current research interests:
- Autonomous Driving
- Emobodied AI
- Mobile Robots

News
| Nov 2, 2025 | 🎉 Paper LeapVAD: A Leap in Autonomous Driving via Cognitive Perception and Dual-Process Thinking is accepted by TNNLS 2025 ! |
|---|---|
| Aug 2, 2025 | 🎉 Paper DriveArena: A Closed-loop Generative Simulation Platform for Autonomous Driving is accepted by ICCV 2025 ! |
| Jul 6, 2025 | 🎉 Paper CogDDN: A Cognitive Demand-Driven Navigation with Decision Optimization and Dual-Process Thinking is accepted by ACMMM 2025 ! |
| May 15, 2025 | 🎉 Paper L2COcc: Lightweight Camera-Centric Semantic Scene Completion via Distillation of LiDAR Model is accepted by IROS 2025 ! |
| Dec 10, 2024 | 🎉 Paper Driving in the Occupancy World: Vision-Centric 4D Occupancy Forecasting and Planning via World Models for Autonomous Driving is accepted bys AAAI Oral. |
Selected Publications
2025
-
- ACMMMCogDDN: A Cognitive Demand-Driven Navigation with Decision Optimization and Dual-Process ThinkingIn Proceedings of the 33rd ACM International Conference on Multimedia, 2025
- IROSL2COcc: Lightweight Camera-Centric Semantic Scene Completion via Distillation of LiDAR Model2025
- AAAIDriving in the occupancy world: Vision-centric 4d occupancy forecasting and planning via world models for autonomous drivingIn Proceedings of the AAAI Conference on Artificial Intelligence, 2025

2024
- RadarCam-Depth: Radar-Camera Fusion for Depth Estimation with Learned Metric ScaleIn 2024 IEEE International Conference on Robotics and Automation (ICRA), 2024
- JFRFMCW Radar on LiDAR map localization in structural urban environmentsJournal of Field Robotics, 2024



2023
- Coco-LIC: Continuous-Time Tightly-Coupled LiDAR-Inertial-Camera Odometry Using Non-Uniform B-SplineIEEE Robotics and Automation Letters, 2023
-
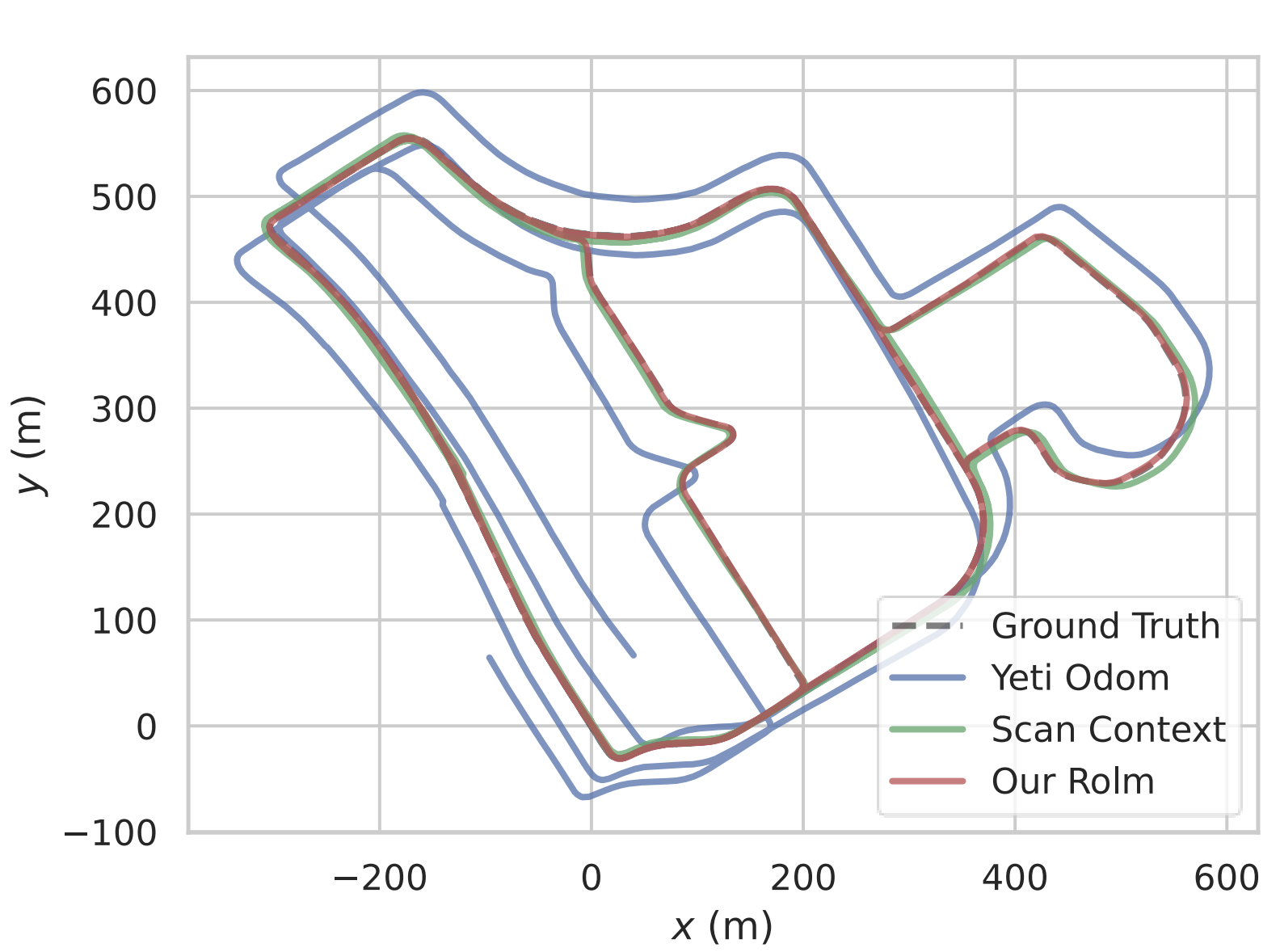 RoLM: Radar on LiDAR Map LocalizationIn 2023 IEEE International Conference on Robotics and Automation (ICRA), 2023
RoLM: Radar on LiDAR Map LocalizationIn 2023 IEEE International Conference on Robotics and Automation (ICRA), 2023
2022
- Ctrl-VIO: Continuous-Time Visual-Inertial Odometry for Rolling Shutter CamerasIEEE Robotics and Automation Letters, 2022